
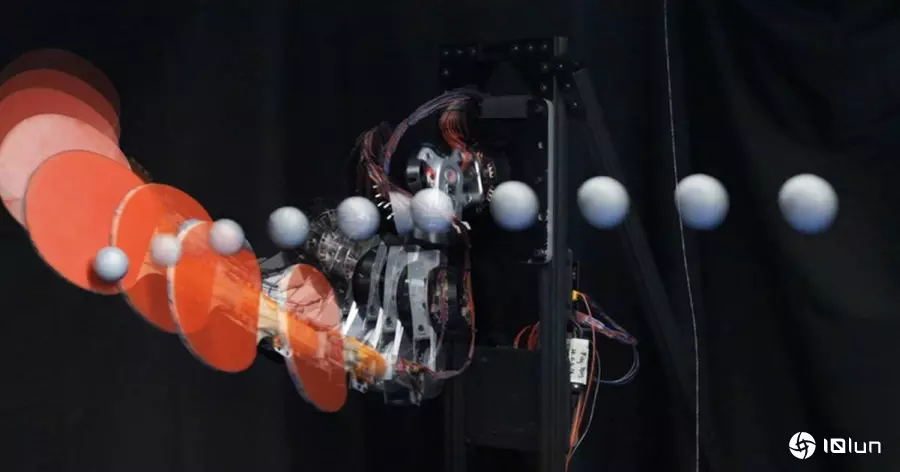
麻省理工学院(MIT)仿生机器人实验室近日发布了一项最新研究成果:一套专为打乒乓球设计的机器人系统,具备高精准击球能力,不仅能产生多种球路与旋转,击球成功率更高达88%。该研究已于预印平台arXiv公布,相关论文由Kendrick Cancio、David Nguyen等人共同撰写。
Cancio表示,实验室长期致力于开发高性能的机器人硬件与控制系统,这套新系统则是受机器人与AI研究机构委托,目的是探索高动态操控的潜力,希望最终让仿人型机器人能在乒乓球这类精密对打项目中达到人类选手的水平。
这个机器人平台包含两大模块:一为传感系统,运用现成的动作关注技术即时掌握乒乓球运动轨迹;另一为控制执行系统,能预测来球轨迹、规划击球动作,并于挥拍过程中动态修正,确保以正确角度与速度击球。
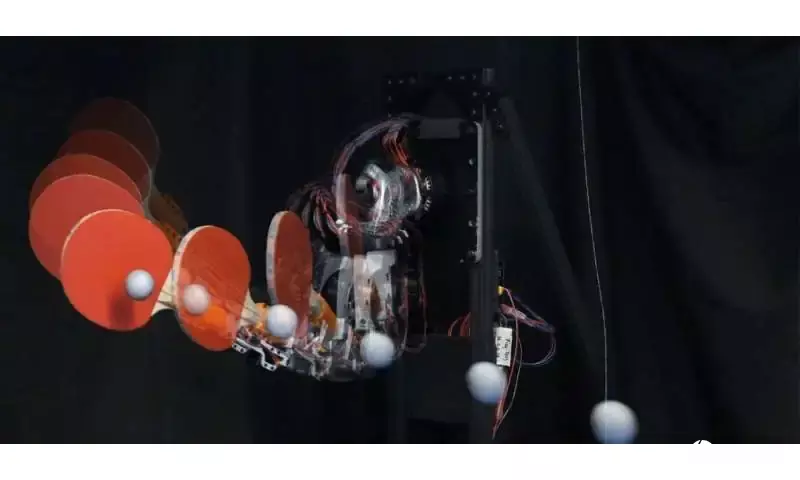
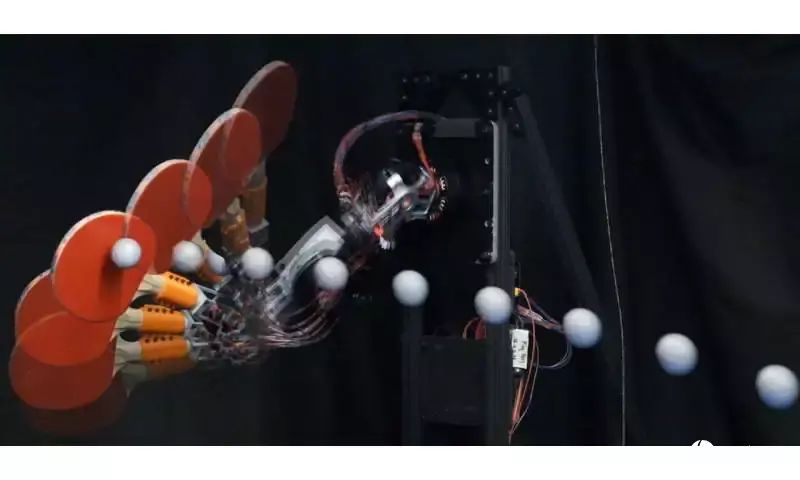
Nguyen强调,这套系统不同于一般仅针对手臂位置下指令的做法,而是为整个挥拍过程设计完整路径,虽然挑战更高,却能显著提升命中准确率。MIT团队也特别为这项研究设计出高扭力、低惯性的机器手臂,使其在短时间内完成激烈动作,未来有望应用在如搜救、危险环境操作等场景。
MIT仿生机器人实验室利用轻量化、高扭力、低转子惯性的五自由度机械手臂,结合模型预测控制(Model Predictive Control, MPC)技术,实现高精度的乒乓球击球动作。该系统能够执行多种击球方式,包括上旋(loop)、平击(drive)和下旋(chop),在实验中达到了88%的击球成功率。
实测显示,该系统平均出球速度达每秒11米,不仅稳定性高,整体表现也相当接近人类初中端选手的水准。
Cancio认为,尽管目前业界热衷使用强化学习来提升机器控制效率,但这项研究说明传统的“限制条件优化”(constrained optimization)仍具独特价值,未来或可与机器学习方法结合,创造更强大效果。
团队接下来将继续优化系统,包括提升击球速度、强化对乒乓球的识别能力,并计划在机械臂上加装龙门架结构,扩大可移动范围,实现完整的人机对战功能。








