

微型机器昆虫(microrobot)并不是新概念,但要让重量只有回纹针的小型飞行器完全复刻昆虫飞行,真是难度极高的挑战。最近麻省理工学院(MIT)再次突破技术极限,《Science Advances》刊登最新成果,展示能以接近大黄蜂(bumblebee)速度与敏捷性的微型飞行器。这项进延展续MIT团队今年稍早成果,新机器昆虫从“能稳定飞行”升级为“像昆虫灵活飞翔”!
年初起步:可长时间悬停的机器昆虫
年初MIT团队已展示连续悬停约17分钟的微型飞行机器昆虫。核心是由更高效的人工肌肉(artificial muscle)驱动与更稳定的双翼设计,能在空中维持罕见稳定性。也重新设计整体结构,减少气流干扰。简化结构让机器昆虫能承受更多损伤,也发布空间给电池、传感器或通信组件。因首度展现“微型飞行器能长时飞行”,这款机器昆虫被视为人工授粉(mechanical pollination)等新应用的雏形。
年底新版突破:大幅逼近真昆虫的飞行力
最新机型不再只强调“能飞多久”,而聚焦昆虫高速机动力。MIT团队将人工智能控制系统导入机器昆虫架构,采模仿学习(imitation learning)与两阶段飞行控制(two-step control scheme),能以几乎接近真实大黄蜂的速度、加速度与俯仰角变化飞行。实验时能短时间内完成连续反转、急速转向,甚至受侧风干扰时仍能维持稳定。这已不是单纯悬停或滑行,而是极为敏捷的飞行表现,象征微型飞行器性能再次升级。
最新机器昆虫已能像真实昆虫快速调整姿态、抵抗扰动、完成复杂空中动作,等于将微型飞行器从“能否飞起来”推向“是否足以应对真实环境”。尽管成果令人振奋,但目前机器昆虫仍无法独立运行。控制系统仍依赖外部计算机,而非内置机体;此外,电源、传感器、导航模块也都还没放入微型结构。只有克服这些挑战,机器昆虫才有机会在户外或农场工作。
总结而言,从年初稳定悬停,到年底高速敏捷飞行,MIT团队又再次将机器昆虫技术往前推进一大步。之后若能集成自导航、能源管理与环境传感,这类机器昆虫终有可能进入农业、生态监测或危险场景等有大用途的地方,发挥独特功能。
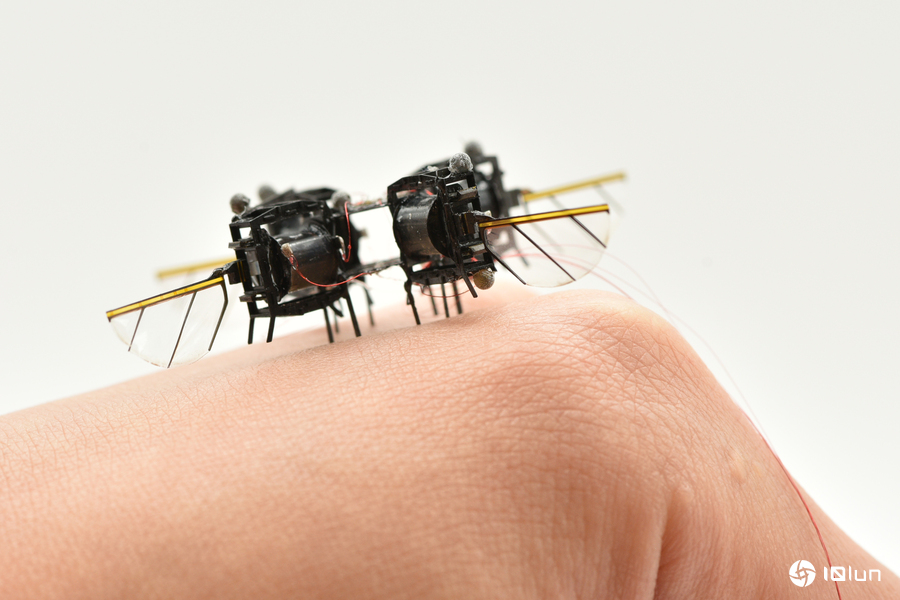
(首图来源:the Soft and Micro Robotics Laboratory/MIT)








