研究人员报告说,他们开发出了一种他们称之为“库伦飞行器”(CoulombFly)的无人机,只要有阳光照射,它就能自主供电悬停。 这架无人机的形状与你见过的任何飞行器都不一样,它结合了太阳能电池、电压转换器和静电马达来驱动类似直升机的螺旋桨——所有组件都经过了效率和重量的平衡优化。
但如果你想买这款无人机,购买之前需要注意的事项也很多。 它没有机载控制硬件,而且无人机本身也无法进行定向飞行,这意味着如果在户外释放,它会随风飘荡。 许多零件看起来也很脆弱。 然而,该设计可以微型化,因为研究人员制造了一个仅仅9毫克的版本。
这项发展的一个关键是研究人员认识到大多数无人机使用电磁马达,这涉及大量金属线圈,会给系统增加相当大的重量。因此,该团队决定专注于开发轻量级静电马达。这些马达依靠电荷吸引和排斥来驱动,而不是磁力相互作用。
研究人员开发的马达相对于无人机的尺寸来说相当大。 它由一圈称为定子的固定带电板组成。 这些板由覆盖有铝箔的薄碳纤维板组成。 运行时,相邻板具有相反的电荷。 周围有一圈64个旋转板。
当外圈中的板充电时,马达开始运行。 由于定子上附近的一个板保证具有相反的电荷,因此拉力将开始旋转环转动。 当定子和转子的板达到最接近时,细线会接触,允许电荷在它们之间传输。 这确保了定子和转子板现在具有相同的电荷,将吸引力转换为排斥力。 这使转子持续运动,并保证转子的板现在具有与下一个定子板相反的电荷。
这些系统通常只需要很小的电流就可以运行。 但它们确实需要板之间有很大的电压差。
当连接到10厘米、八叶片螺旋桨时,该系统可以产生最大5.8克的升力。 这为研究人员在设计其余组件时提供了明确的重量目标。
太阳能电池由一层薄薄的砷化镓制成,这种材料比其他光伏材料贵得多,但效率更高(30%的转化率,相比之下其他材料通常在20%多)。 这往往会提供系统所需的相反的东西:在相对较低的电压下具有合理的电流。 因此,该系统还需要一个高压电源转换器。
在这里,研究人员牺牲效率来减轻重量,将一堆电压转换器串联起来,创建了一个仅重1.13克的系统,但将电压从4.5 V一直提高到9.0 kV。 但这样做的功率转换效率仅为24%。
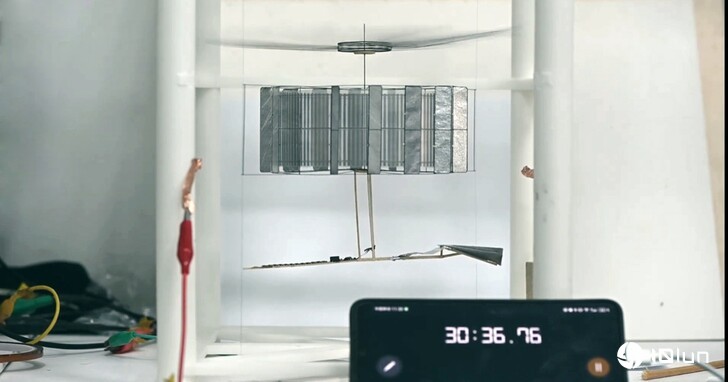
由此产生的CoulombFly由大型圆柱形马达控制,顶部是螺旋桨。 下面悬挂着一个平台,一侧是太阳能电池,另一侧是长而薄的电源转换器。
为了测试他们的系统,研究人员在北京一个阳光明媚的日子打开了一扇窗户。 从中午开始,无人机起飞并盘旋了一个多小时,所有迹象都显示,只要阳光提供足够的电力,它就会持续下去。
整个无人机系统需要超过0.5瓦的功率才能维持在空中。考虑到无人机总重量为4克,这意味着它的升力功率效率为每瓦7.6克。但这其中有大量的功率在电压转换过程中损失掉了。如果单独考虑马达本身,它只需要0.14瓦的功率,升力功率效率就超过了每瓦30克。
研究人员提供了一份很长的清单,列出了他们可以改良设计的方法,包括增加电机的扭矩和螺旋桨的升力、将将太阳能电池放置在结构组件上,以及提高电压转换器的效率。但他们不必优化的一件事是飞行器的尺寸,因为他们已经制造了一个只有8厘米高、仅重9毫克的小型化版本,但能够产生1毫瓦的功率,使螺旋桨以每分钟超过15,000转的速度旋转。
同样,所有这些都是在没有任何机载控制电路或将机器移动到任何地方所需的硬件的情况下完成的,所以他们基本上是在笼子里飞行这些无人机,以防止它们随风飘走。 但是,以这样的重量似乎还有一些空间可以加入一些额外的硬件,特别是如果他们能做到他们提到的那些改进方案。








