在未来的机器人世界中,如何训练人形机器人成为一个重要的课题。伊利诺大学厄巴纳-香槟分校(University of Illinois Urbana-Champaign)的研究人员提出一种创新方法:将一个名为CHILD(人形模仿与即时展示控制器)的微型机器人放在婴儿背带中,让人类操作员通过自身动作来训练更大的机器人。这种方法不仅能收集数据,还能帮助开发自主的双足行走模型。
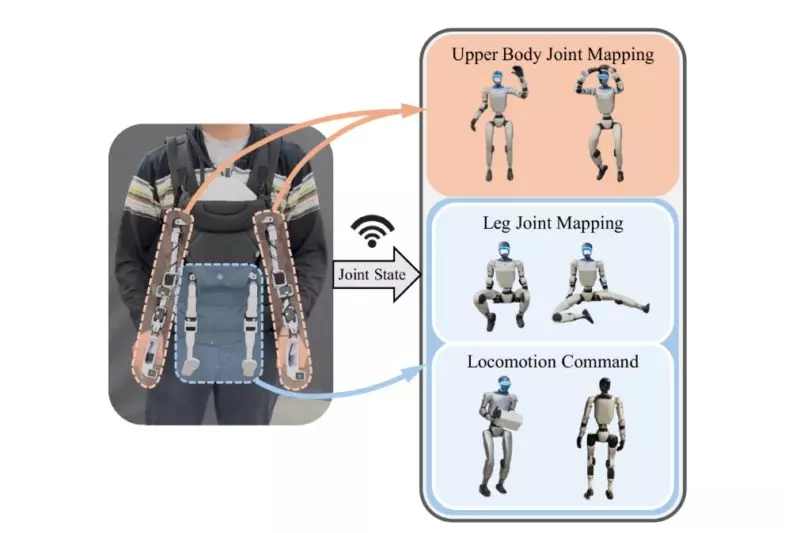
CHILD微型机器人的尺寸方便携带与佩戴,其设计旨在简化人形机器人的操作,用户只需通过背带里的机器人移动手臂或腿部,远程的机器人便会模仿这些动作。这种直观的控制方式使得一般用户也能轻松操作机器人,无需专业的技术背景。
该项目由伊利诺伊大学香槟分校机械工程系的Joohyung Kim教授领导,他表示,这种方法不仅便于使用,还具有成本效益。CHILD的硬件成本不到1,000美元,并且可以使用3D打印技术制作外壳,这使得它比传统的外骨骼和即时动作捕捉系统更具优势。利用3D打印技术制作外壳,具备低成本、可快速迭代和高定制性的优势。
Kim教授还提到,CHILD的设计灵感来自于父母在使用婴儿背带时,自然教导孩子动作的过程。这种设计不仅便于操作,还能够在不需要个别调整的情况下,让大多数成年人轻松使用。通过行为复制技术,CHILD能实现人类动作直接映射机器人操作,促进模仿学习效率。
这项研究的学术论文将于10月在韩国首尔的IEEE RAS HUMANOIDS 2025会议上发布,届时将进一步探讨CHILD的潜在应用及其在机器人技术中的重要性。该会议是机器人领域顶尖学术盛会之一,聚焦于人形机器人先进技术的展示与交流,Kim教授将在该会议发布相关论文,显示该项目具备国际学术认可度。
(首图来源:论文)








