
香港大学工程学院机械工程系助理教授鲁鹏领导的研究团队,成功开发创新空中象鼻机械臂(AET),在空中操作技术领域取得重大突破。这款仿照大象鼻子灵活性设计的新型空中连续体操作器,展现出执行复杂空中操作任务的卓越能力,为低空经济发展带来重大进展。
传统空中机器人依赖刚性机械臂和夹具设计,经常受到重量限制和活动范围有限的困扰。AET改变了这种情况,采用柔软灵活结构抓取对象,有效解决无人机载重能力与机械臂灵活性平衡的固有限制。
鲁鹏教授表示:“通过设计高度紧凑的空中连续体机械臂,我们可以在复杂环境中执行各种空中操作任务。AET与现有空中操作器相比极其灵巧,因为其机身可以变成任何形状。它可以用机身抓取各种尺寸和形状的对象,这种能力对于只能用夹具抓取对象的传统空中操作器来说几乎不可能实现。”
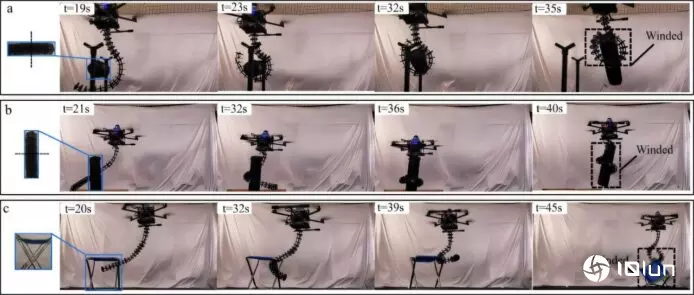
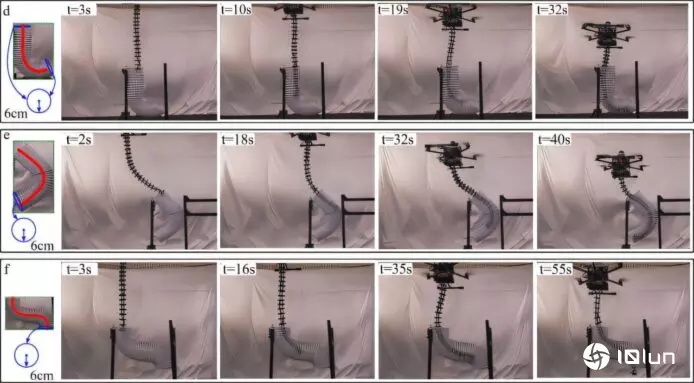
AET无需传统夹具,而是围绕不同尺寸和形状的物品进行包裹抓取。这种设计令它能够抓取传统无人机无法处理的对象,特别适合在狭窄渠道、复杂障碍物和受限空间中操作。据称,系统在杂乱和受限环境中表现出色,能够穿越各种形状的渠道,克服传统空中操作器难以应对的障碍。凭借抓取各种对象和在多样化环境中操作的能力,AET大幅扩展了空中操作的应用范围。
AET能够在具挑战性的空中环境中执行抓取、运输和维护任务。应用范围包括在灾难现场清理碎片、移除高压电线上的杂物,以及维护跨海大桥等基础设施。这种灵活性在灾难应急中也可以发挥本领,配备AET机械臂的无人机可以从倒塌建筑物或受损电线中移除碎片,其伸展能力和精确度也令它们适合在难以从地面进入的桥梁或其他基础设施上进行检查和维修。
随着各国扩大无人机在工业和紧急应用中的使用,AET等技术可能推动低空经济的增长。该领域包括空中物流、基础设施监控和偏远地区服务。AET设计和控制方面的进步将为灵巧空中操作奠定坚实基础,为低空经济发展带来新产业和新模式。研究成果已在《Nature Communications》期刊发布,论文题目为《用于杂乱和受限环境的灵巧顺应空中连续体操作器》。
鲁鹏教授及其实验室团队目标是改善空中操作性能和可靠性,AET的成功为更先进、多功能的无人机系统奠定基础。这些系统可能很快成为从公共安全到能源维护等各领域的重要工具。
来源:HKU








